Detailed Technical Proposal
Tesseract System
Approach
Based on the initial proposal and the physical miniature models, we have developed adjustable computer simulations of the Tesseract as a mechanical system. These allowed us to test multiple strategies regarding the movement of the revolute joints (like a hinge) that are the corners and the prismatic joints (piston-like) that are the edges of the Tesseract.
Those preliminary simulations have shown that the most desirable way, a Tesseract that can revolve around several spacial axes, seems to be extremely difficult to realize as it requires the corner joints to allow for multiple axes of rotations of the four connected edges while having the ability to “lock” individual rotation axes as the Tesseract would otherwise collapse.
Limiting the corner joints to a revolution around a common axis allows us to keep the Tesseract stable and controllable.
The two approaches to control the Tesseract were:
Actuate the corners on one axis and leave the edges to slide freely. Our simulations proofed that is possible to control the movement and state of the Tesseract using only one rotational actuator per corner (16 in total). We performed research into possible actuators and there is a good supply of robotics actuators available that can be driven in a mechanically compliant way: force necessary can be applied to the system, but the actuator can also move freely if necessary or act as a spring to counteract the movement of the rest of the system. One downside to this approach is the relatively high torques that the corner actuators must exert and the connecting edges must withstand. Therefore this approach has not been chosen.
Actuate the edges (linearly extending and contracting) and leave the corner joints to rotate freely around one axis. This requires 32 linear telescoping actuators that can be extended by a factor of around 2.8 to 4 (depending on how close the telescopic range is to the actual corner). The availability of proven and suitable industrial telescoping actuators is very limited. We have developed a unique type of telescopic actuator for the Tesseract.
General construction and movement

The Tesseract will perform a revolving movement, turning itself inside-out and outside-in continuously. In the initial configuration a small inner cube is positioned in the center of a large outer cube. The revolution begins with the inner cube moving towards one face of the outer cube. It will then protrude that face and move out of the outer cube. The edges of the inner cube will then extend, enlarging the inner cube. The opposite face of the outer cube will shrink. When the inner cube has completely run through the previous outer cubes face a new outer cube and a new inner cube has formed. One movement cycle will take between 20 and 90 seconds.
The Tesseract is designed to be as lightweight as possible while being as strong as necessary. The majority of parts are made from aluminium and different technical plastics. Steel is used in places where strength (e.g. ball screw, shafts and screws) is necessary. The edges, formed by telescopic actuators are mainly made of hard anodized aluminium pipes and CNC milled aluminium parts. The corner joints are composed of a stack of cylindrical parts enclosing a hollow shaft and wings that connect to the outer stages of the telescopic actuators.
During maximum extension, the Tesseract reaches dimensions of up to 230 cm x 230 cm x 230 cm. The Tesseract consist of 32 edges, formed by telescopic actuators and 16 corners, formed by corner joints. The total weight of the Tesseract is 150 kg.

Telescopic actuator
The Tesseract’s revolving motion requires the 32 edges that connect the corners to change in length by an extension factor of over 2.4. In its longest state an edge will be over 2.4 times longer than in its shortest state. The movement is actuated by changing the length of the Tesseract edges through custom-built telescoping actuators.
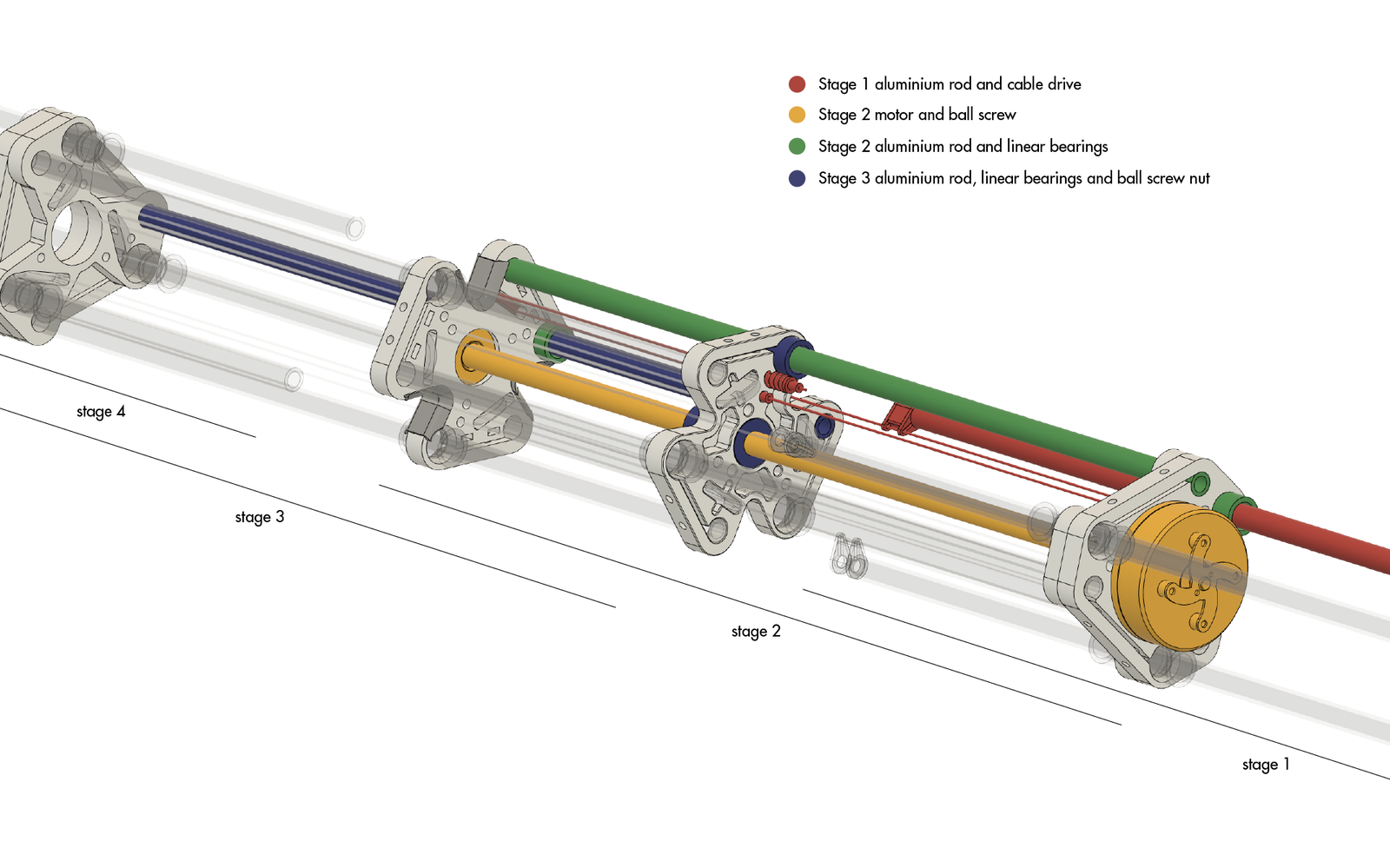
The telescoping actuator consists of 4 stages. The two inner stages are linearly moving through a ball screw driven by a brushless DC motor. The two outer stages are linked with cable drives that are translating the motion of the inner stages to the outer stages. The aggregated extension of the telescopic actuator is linked to the relative translation between two stages, and thus to the ball screw motion, with a transmission ratio of three.
Each stage consist of three hard anodized aluminium rods and aluminium plates at the ends. All components of the stages (like pulleys, cables, motor) are mounted on the aluminium plates. The stages are linked through polymer glide bearings sliding along the aluminium rods of the adjacent stages.
Structural stiffness/damping
The linear rods and glide bearings allow for a small amount of play that prevents the Tesseract from jamming. The cable drives are tensioned by additional springs to absorb impact forces that might occur e.g. when the Tesseract tips over on to another corner due to shift of its center of mass while revolving.
Position and force feedback
The individual actuators of the Tesseract cannot perform a classical homing cycle on initialization, because an individual movement of just one actuator will very likely lead to an impossible configuration. Thus there is an absolute position feedback for every actuator. A time-of-flight sensor measures the distance between two of the telescoping stages.
Each of the telescopic actuators can measure the force acting upon it through motor current measurement. Although not strictly necessary for the general operation, it enables the detection of mechanically difficult situations. This allows the system to apply less overall strain on the mechanical components for a longer lifespan.
Corner joints


The telescopic actuators, resembling the edges of the Tesseract, are connected at corner joints. The corner joint has a hollow shaft that is the axis of rotation. Two of the four adjacent edges rotate continuously around the axis but do not change more than 180 degrees in regards to each other. The other two adjacent edges are rigidly connected through a hollow shaft. The corners are not actively actuated. There will be 16 corner joints in total.
Power and communication
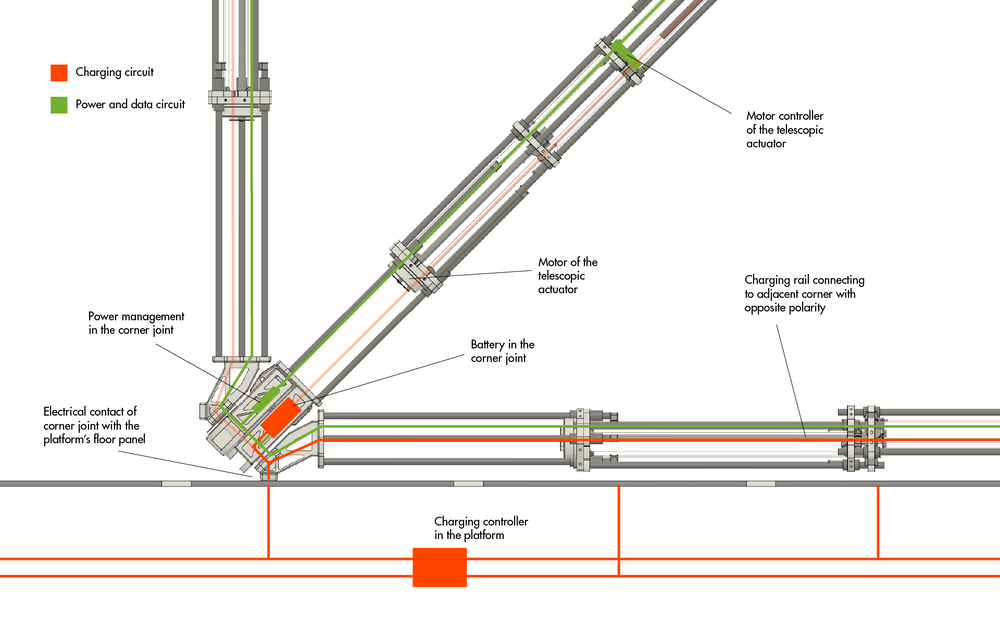
The corner joints are the point of contact with the floor and are facilitating the electrical connection with the floor panels of the platform (See Platform for detailed description). The corners also house LiFePo4 Batteries and power management circuit boards. The total capacity of one corner’s batteries will be 2 Ah at 12 Volts. That gives us a total capacity in the system of about 32 Ah at 12 Volts (=384 Wh). Conventional Lithium Ion batteries are not an option here, because of their chemical instability and fire hazard. This is why we chose using small, self-contained battery cells that are certified and have a protection circuit against short circuit, temperature and overcharging already included.
Electrical power and data from the batteries and power management has to be transmitted between the two ends of the telescopic actuator and from these ends to the motor system. As the distance between those points changes significantly during the extension and contraction, the electrical connection will happen through both the electrically conductive aluminium rods on the outer stages and through the steel cables of the cable drive.
The connections carried over the edges from corner to corner are:
The charging rail: It allows the power management in the corners to charge the buffer batteries if there is an opposite potential on an adjacent corner.
The power and data bus: This is a low voltage DC power bus (24V) that supplies power to the control electronics and motor located on the linear actuators. It is also connected to each adjacent corner, so batteries of corners that are not connected by the charging rail, can be charged as well. To lower the complexity of wiring in the system, we are using an RS485 Transceiver that enables us to use the power line for data communication using Manchester coding for modulation and demodulation.
The power management in the corners has to fulfill some very important requirements:
- Sense if there are differing potentials on the charging rails and charge the batteries, if this is the case
- Supply power to the power bus if the batteries are sufficiently charged
- Sense short circuits and turn of the power until the situation has resolved
- Communicate over the data bus to coordinate power delivery with the other power controllers
See Control & Safety for a description of the control system.
Platform



The Tesseract is moving on a Platform that serves three functions:
- Confining movement of the Tesseract to the area inside the platforms boundaries.
- Signifying visitors not to step into the Tesseract’s space.
- Supplying electrical power to the Tesseract.
The Platform’s floor is basically level with the floor of the exhibition space. The outer dimensions of the Platform are 8 m x 5 m and the inner floor area is 7 m x 4 m. Around the perimeter it is framed by a 50cm high edge that is 45° sloped on the insides and vertical on the outsides. The floor of the platform is composed of panels made from stainless steel sheet metal. There are isolation stripes between the sheet metal panels made from a non-conductive material like white HDPE. The sheet metal panels and isolation stripes are supported by wooden particle boards. The particle boards rest on rubber mats to compensate for any irregularities and to dampen vibrations. The Boundaries of the platform are sloped on the inside and vertical on the outside. The inner slopes and outer walls are made from bent stainless steel sheets. The angle of the inner slope aids the Tesseract in its movements when it reaches a boundary and the outer vertical wall represents a boundary and an obstacle for the visitors. In the hollow interior of the boundary structure the electrical connections with the sheet metal panels as well as electronics for power and control are hidden.
Power supply scheme
Because the Tesseract is constantly moving and turning itself inside out, the necessary power cannot be supplied with wires. We would like to avoid using rechargeable batteries that have to be changed manually in the Tesseract because a system that supplies power to the Tesseract continuously is very much desirable for the exhibition span of more than 3 years.
We propose a system where the Tesseract moves on a metal floor that consists of electrically isolated stainless steel strips (50 cm wide), separated by an isolating material. While moving over the platform, conductive contact points of the Tesseract make electrical contact with the individual segments. Underneath the platform are the charging controllers. Their function is to provide a low voltage (24 Volts), electronically limited current to the segments. When the conductive contact points make contact to two a pair of sheets with different polarity/phase, TODO: remove. three leg rectification a circuit in the charging controller senses a specific capacitance between those two point on the Tesseract. Only then will the charging controller decide to allow a higher current to flow. By using this approach we can make sure that the system is safe from short circuits caused by foreign objects. Electronic fuses used in industrial and automotive applications further protect the charging electronics and power supplies.
One half of this power supply scheme is directly integrated into the Tesseract, the other half will be be installed and connected in the space under the sloped sidewalls.
This charging voltage is distributed on the Tesseract itself by a dedicated charging rail (described in Actuators).
The total power drawn by this system are between 50 and 300 Watts, depending on the current charging state of the batteries in the Tesseract.
TODO: Chorner PCB
Control system
The individual components referred to here are described in Tesseract: Telescopic actuator and Tesseract: Corner joint.
The Tesseract in itself is a complex system with 32 actuators (motors), each having its own microcontroller. (actuator controllers). The main function of those actuators is to drive the motor of each actuator and report feedback about the current forces and orientations. Those actuator controllers will be interconnected by a data bus.
The power management in the corners are also connected to that data bus.
There is one additional microcontroller (Tesseract controller) on the Tesseract itself gathering all the data from the controllers, evaluating it and making the high-level decision if (safety) and how the actuators should move. This high level controller is connected by an industrial RF link module (not WiFi or the like) to a small computer housed inside the base.
This computer (main controller) has two functions: It allows us to monitor the state of the Tesseract system and decides whether the Tesseract will run or not. Our proposed solution is to have the controller outside the Tesseract send a defined heartbeat signal (with a checksum), that signals to the Tesseract if everything is alright and any movement should be performed. For safety, the power supply of the transmitter can be interrupted by the emergency stop circuit.
Visualizations





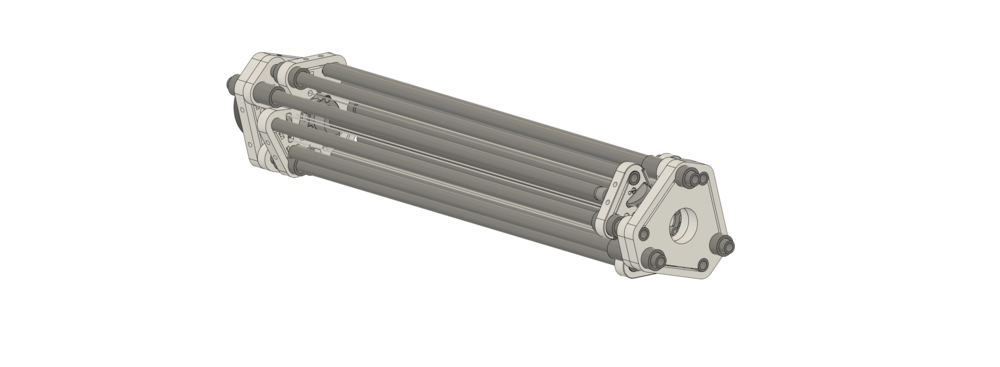
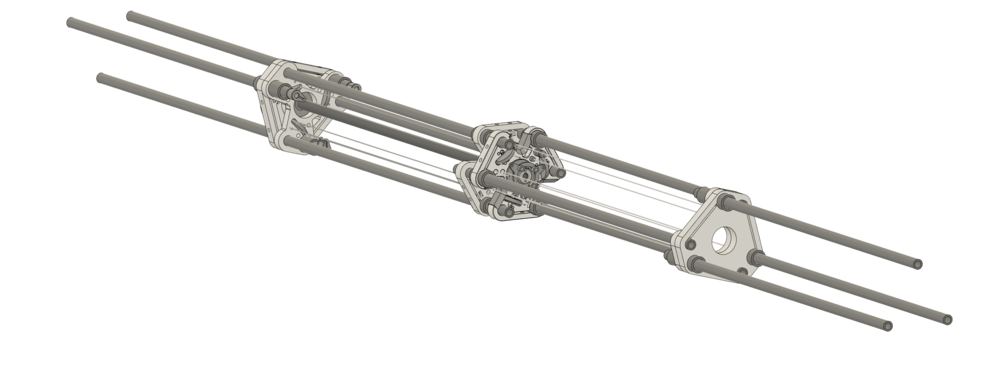
Prototype r2 of Telescopic Actuator






Prototype r2 of Telescopic Actuator






Video
Prototype square


